..
Week of the 28/12/2020 - #53
Contents
Tech
- TIC80 interference effects
TIC80 interference effects
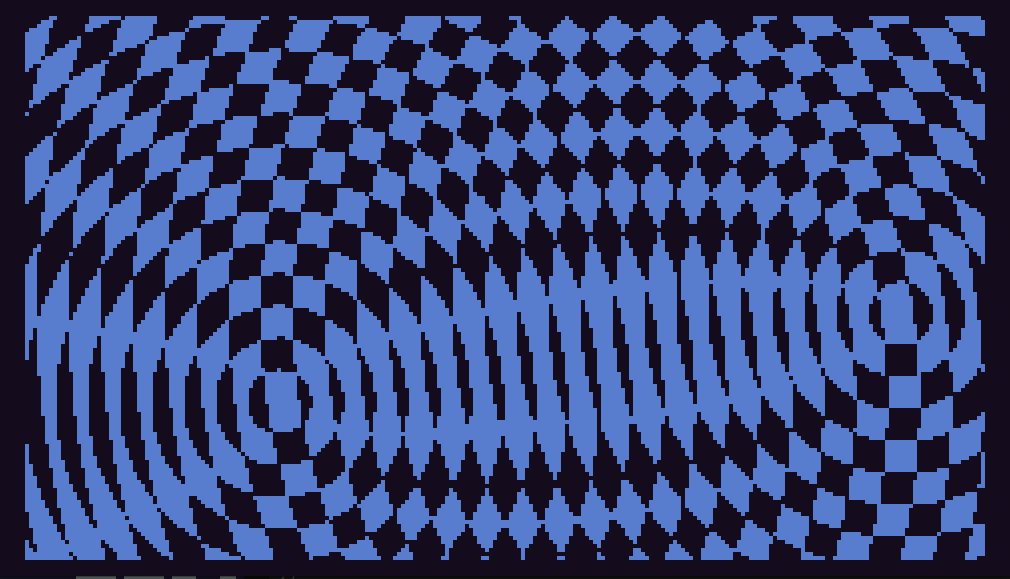
Finishing the year I played around with coding demo effects on the TIC80. I started from this effect and tried to get it first to fit in 256b which I was able to get down to 193b or 159 with compression with this code:
m=math
function n(x,y,a)
return m.sqrt((m.sin(a)*100+120-x)^2+(m.cos(a)*34+68-y)^2)//1&8
end
function TIC()
q=time()/1500
for j=0,135 do
for i=0,240 do
pix(i,j,n(i,j,q-2)-n(i,j,q))
end
end
end
which yields:
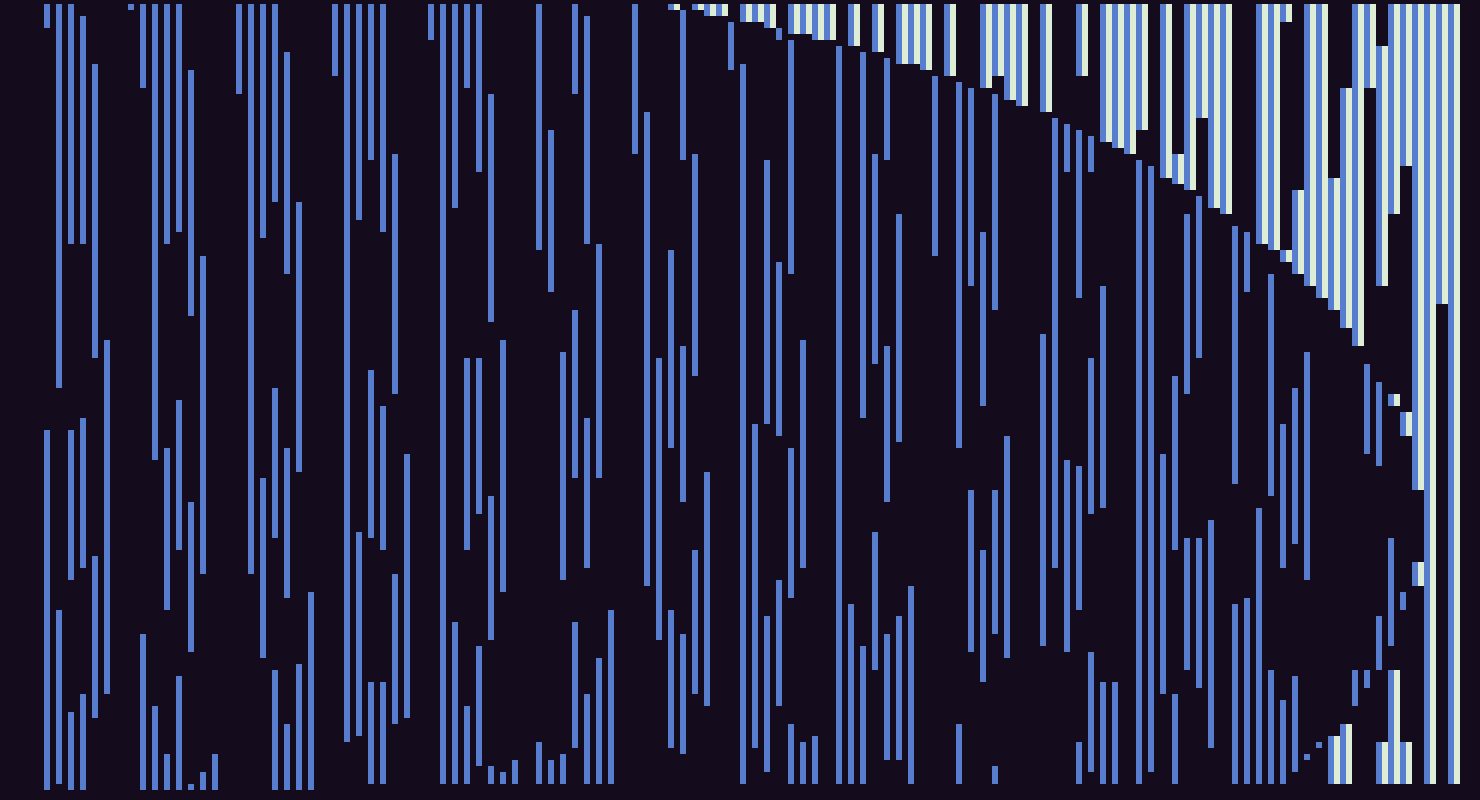
I tried in many ways to get it down to 128b but had no success. So I started tweaking the effect and came across some interesting variations based on it. This is one I like which has a nice transcient at the beginning:
m=math
function n(x,y,a)
return ((m.sin(a)*90-x)^2+(m.cos(a)*90-y)^2)//2^10&8
end
function TIC()
q=time()/1500
for o=0,5^6 do i=o%120 j=o//360
poke(o,n(i,j,q*1.2-i*m.exp(-q))-n(i,j,q))
end
end
Which yields a nice sequence:
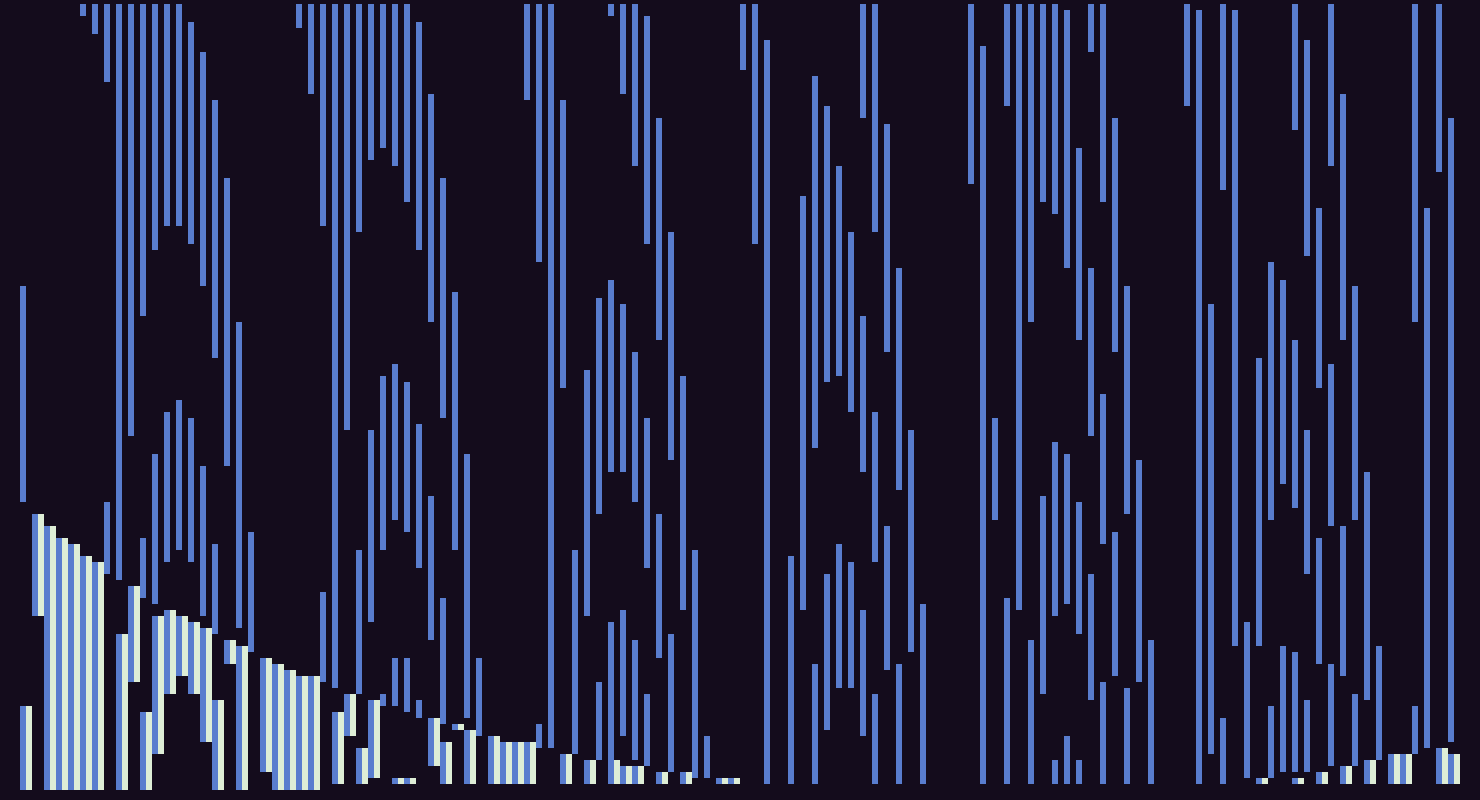
You can make it a little more periodic by adding a sin(q) in the exponential:
m=math
function n(x,y,a)
return ((m.sin(a)*90-x)^2+(m.cos(a)*90-y)^2)//2^10&8
end
function TIC()
q=time()/1500
for o=0,5^6 do i=o%120 j=o//120
poke(o,n(i,j,q*1.2-i*m.exp(-5*m.sin(.5*q)))-n(i,j,q))
end
end
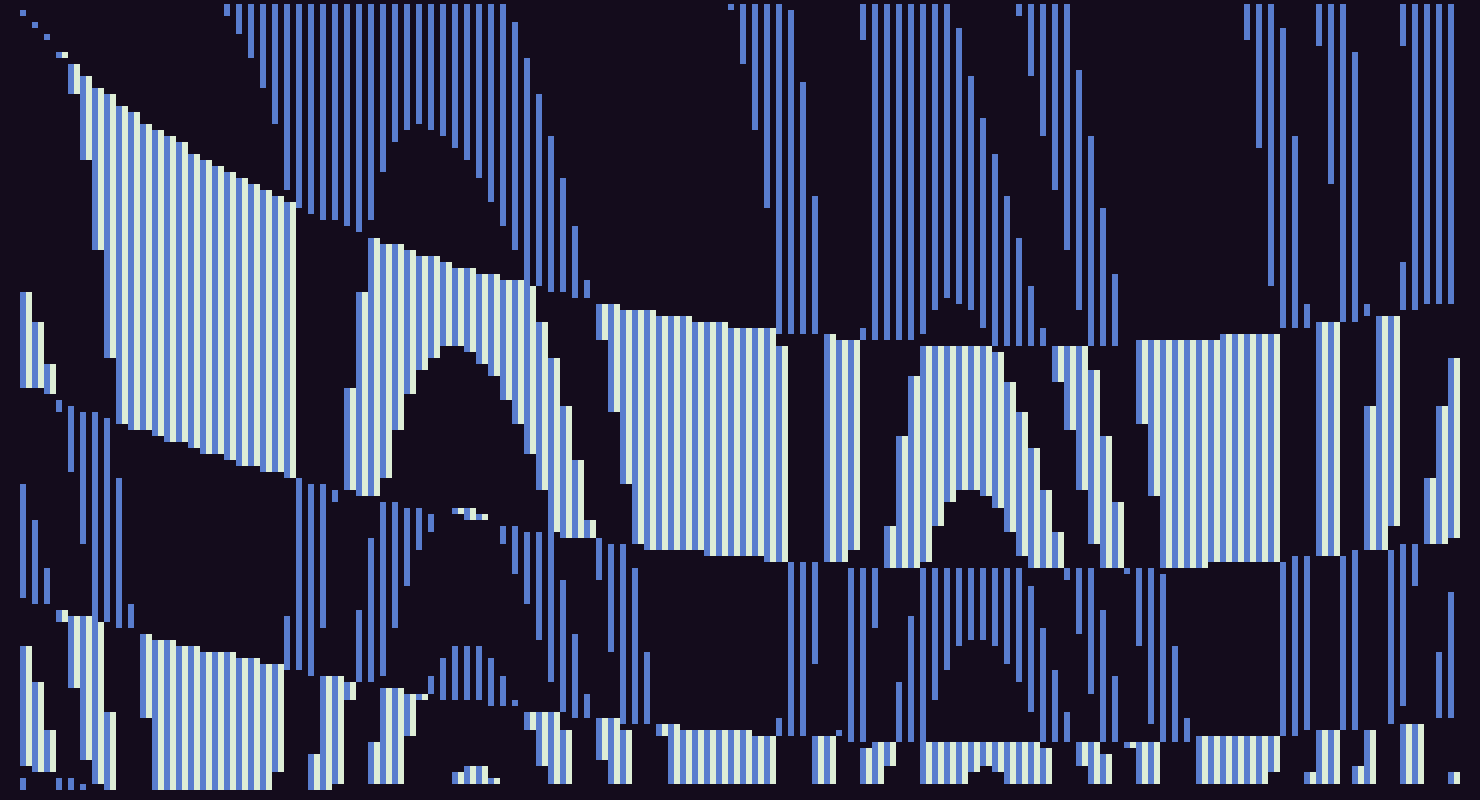
The smallest I could get with something nice is this (155 bytes compressed):
m=math
function n(x,y,a)
return ((m.sin(a)*90-x)^2+(m.cos(a)*90-y)^2)//2^10&8
end
function TIC()
q=time()/1500
for o=0,5^6 do i=o%120 j=o//120
poke(o,n(i,j,q*1.2)-n(i,j,q))
end
end
This one also is pretty nice:
function n(x,y,a)
return ((math.sin(a)*90-x)^2+(math.cos(a)*90-y)^2)//2^10&8
end
function TIC()
q=time()/1500
for o=0,2*5^6 do i=o%240 j=o//240
poke4(o,n(i,j,q*1.2)-n(i,j,q))
end
end
